弊社のフィールドバス・省配線システムは長年の経験と実績を基にした
開発により、厳しいFA環境でも高品質、高信頼性を実現しています。
A-Link(HLS) |
※AP4Aシリーズで利用できるマスタユニットのマニュアルはここをクリックししてください。
MECHATROLINK-Ⅲマスタ AP302EX
A-Linkマスタ AP303EX
Anetマスタ AP304EX
デジタル入出力 AP306EX
EtherCAT
EtherCATのマスタと豊富なスレーブユニットをラインアップしています。
EtherCATとは通常のEthernetベースの通信回線を利用した超高速フィールドバスシステムです。
100Base-TX (100Mbps)を使用し、帯域幅は2×100Mbaud(フルデュプレックス)です。
| EtherCAT スレーブの受託開発もご用命ください |
| EtherCATシリーズ | EtherCAT ちび丸くんシリーズ | |
 |
 |
|
| INtime搭載の産業用パネルPC・産業用PCにマスタスタックをバンドルして提供いたします。 各スレーブユニットも各種取り扱っています。 |
PNP/NPN対応の超小型スレーブユニットで豊富なバリエーションを揃えてます。 | |
| EtherCATスレーブユニット | 超小型EtherCATデジタル入出力(NPN/PNP仕様) | |
| ・ECEA (アナログ入出力) | ・ECCEP デジタル入出力 (e-CONコネクタ) | |
| ・ECEM (モーションコントローラ) | ・ECCMP デジタル入出力 (MILコネクタ) | |
| ・ECEC (エンコーダ入力) | ・ECCBP デジタル入出力 (小型端子台) | |
| ・ECES (SIOゲートウェイ) | ・ECCBYリレー出力(小型端子台) | |
| ・ECEB (Modbusゲートウェイ) | 超小型EtherCATアナログ入出力 | |
| ・ECEL (A-Linkゲートウェイ) | ・ECCEA アナログ入出力 | |
| EtherCATちび丸くんシリーズ機種一覧 |
| 型式 | 品名 | NPN 対応 |
PNP 対応 |
点数 | I/Oコネクタ | |||
| IN | OUT | リレー | ||||||
| ECCEP シリーズ DC入力 |
ECCEP80N | 8点入力ユニット | ○ | 8 | e-CON コネクタ |
|||
| ECCEP80P | ○ | 8 | ||||||
| ECCEP08N | 8点出力ユニット | ○ | 8 | |||||
| ECCEP08P | ○ | 8 | ||||||
| ECCEP44N | 4/4点入出力ユニット | ○ | 4 | 4 | ||||
| ECCEP44P | ○ | 4 | 4 | |||||
| ECCMP シリーズ DC入力 |
ECCMPF0N | 16点入力ユニット | ○ | 16 | MIL コネクタ |
|||
| ECCMPF0P | ○ | 16 | ||||||
| ECCMP0FN | 16点出力ユニット | ○ | 16 | |||||
| ECCMP0FP | ○ | 16 | ||||||
| ECCMP88N | 8/8点入出力ユニット | ○ | 8 | 8 | ||||
| ECCMP88P | ○ | 8 | 8 | |||||
| ECCBP シリーズ DC入力 |
ECCBPF0N | 16点入力ユニット | ○ | 16 | 小型端子台 (ヨーロピアン) |
|||
| ECCBPF0P | ○ | 16 | ||||||
| ECCBP0FN | 16点出力ユニット | ○ | 16 | |||||
| ECCBP0FP | ○ | 16 | ||||||
| ECCBP88N | 8/8点入出力ユニット | ○ | 8 | 8 | ||||
| ECCBP88P | ○ | 8 | 8 | |||||
| ECCEA シリーズ アナログ 入出力 (非絶縁) |
ECCEA40 | 4chアナログ入力ユニット | – | – | 4 | e-CON コネクタ |
||
| ECCEA04 | 4chアナログ出力ユニット | – | – | 4 | ||||
MECHATROLINK
MECHATROLINK-Ⅲはモーション制御用フィールドバスです。
物理層にEthernetの技術を利用することにより、100Mbpsの高速通信を実現しています。
かつ、モーション制御に必要な高速サイクリック通信と大容量メッセージ通信を実現しています。
| |
|
| MECHATROLINK-Ⅲシリーズ | ||
 |
 |
|
| MECHATROLINK-Ⅲのモーション制御用フィールドバスに最適なスレーブユニットをご提供します。 | ||
| ・M3EP (デジタル入出力) | ||
| ・M3EA (アナログ入出力) | ||
| ・M3EC (エンコーダ入力) | ||
A-net(CUnet)/A-Link(HLS)
A-net(CUnet)やA-Link(HLS)のマスタユニットとスレーブユニットでフィールドネットワークを構築することで多数の配線を2線式ケーブル1本にすることができ、工数や線材の大幅なコストダウンが図れます。
 |
 |
|
| 最大64台のA-net(CUnet)ユニットが「512バイトのデータ共有」、「リモートI/O制御」、「256バイトのP2Pデータ伝送」を同時に実現できるマルチマスタ型ネットワークを構築 | 一台のマスターユニットと最大63個のスレーブユニットによって超高速にリモートI/Oを制御するネットワークを構築 |
A-net(CUnet)シリーズ
N対N通信で各装置間をリアルタイム共有メモリによりアクセスすることによりリアルタイム分散処理制御を実現させることができます。
| A-net(CUnet)マスタユニット | A-net(CUnet)スレーブユニット | |
| PCIe対応マスタユニット (開発中) |
 |
|
| 高性能プロセッサ搭載の各種マスタユニットを揃えています。 | 通信速度3Mbps、6Mbps、12Mbpsに対応したデジタルI/Oユニット、アナログI/OユニットやシリアルI/Oユニットなどのスレーブユニットを揃えています。 | |
| ・A-net(CUnet)スレーブユニット |
A-Link(HLS)シリーズ
| A-Link(HLS)マスタユニット | A-Link(HLS)スレーブユニット | |
| PCIe対応マスタユニット (開発中) |
 |
|
| 高性能プロセッサ搭載の各種マスタユニットを揃えています。 | 通信速度3Mbps、6Mbps、12Mbpsに対応したデジタルI/Oユニット、アナログI/Oユニットや位置決めユニットなどの各種スレーブユニットを揃えています。 | |
| ・A-Link (HLS) スレーブユニット | ||
| ・A-Link (HLS)スレーブ (ちび丸くん) |
EtherCATとは
| EtherCATとは | |
 |
EtherCATにより、高速マシン制御を 一台のPCシステムで実現します。 |
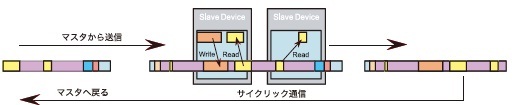
| 通常のEthernetベースの通信回線を利用した超高速フィールドバスシステムです。 100BASE-TX (100Mbps) を使用し、帯域幅は2×100Mbaud(フルデュプレックス)です。スレーブは低価格な専用コントローラを使用します。 |
|
 |
|
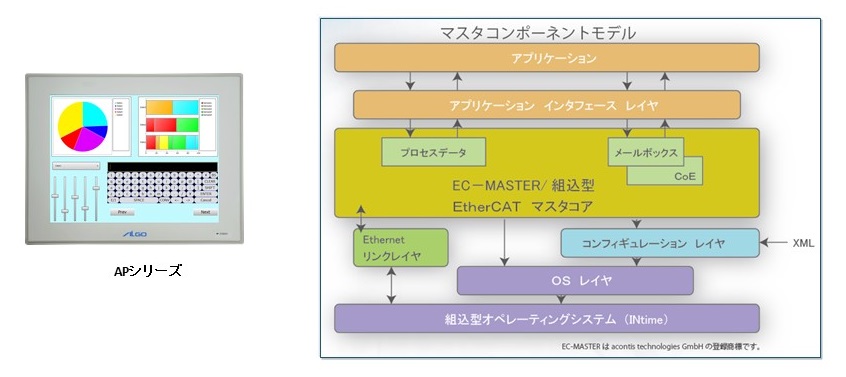
| スレーブはマスタが送信したEtherCATパケット上の割り当てられたデータのみをリード・ライトします。通常のWindowsでは一定周期でパケット送信することが困難であり、RTOSを使用することを推奨します。 弊社ではRTOSにINtimeを使用してEtherCATによる制御を行い、GUI部分はWindowsで行うシステムを提案します。 マスタコンピュータのCPUにデュアルコアタイプを選択していただくことによりひとつのコアにWindows、もう一つのコアにINtimeを割り当てることができます。 これにより、Windowsに影響されることなく安定した制御が可能になります。 |
|
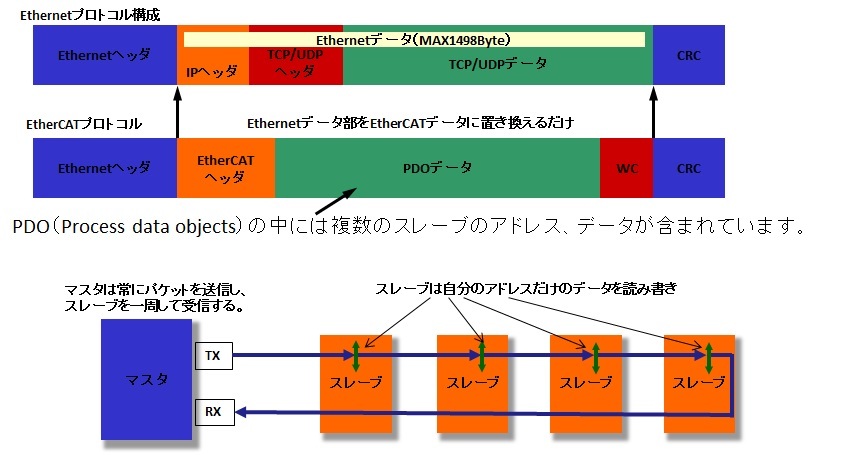
| EtherCATプロトコル |
| EtherCATプロトコルの基本構造は、標準のEthernetフレームそのままで、Ethernetデータ部をEtherCATデータにしてデータを転送します。 |
 |
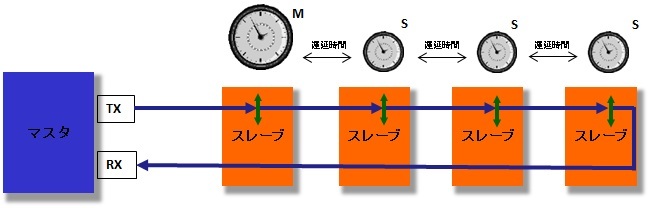
| EtherCATの同期処理 | ||
| モータなどの軸間の多軸同期処理 (ディストリビューテッドクロック) が必要な場合が出てきます。 タイムスタンプを使用して、出て行くフレームと戻ってくるフレームの時間差を計測します。このようにすることで、ノード間の伝搬遅延が計算でき、分散クロックを正確に調整することで全スレーブが1 μsec以下のジッタで同期できます。 |
||
 |
||
EtherCATマスタスタック
| EtherCATマスタスタック ClassA INtime版 | ||
| 産業用パネルPC AP/FPシリーズや産業用PC FCシリーズにバンドルして提供します。対応OSとしてリアルタイムOSであるINtime版を提供します。 当社のコンピュータのネットワークポートは複数(2chもしくは3ch)標準搭載しているため、通常のネットワークと併用してEtherCAT通信が可能です。 |
||
 |
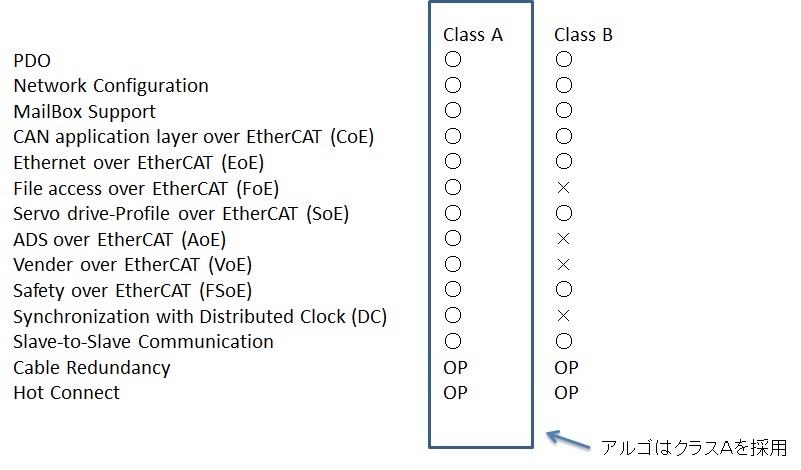
| ETG.1500 マスタクラス 準拠機能 | ||
| EtherCATマスタスタックはacontis technologies GmbH製のEC-Master(旧名AT-EM)の Class Aを採用しています。 | ||
 |
EtherCAT協会(ETG)とは
 |
|
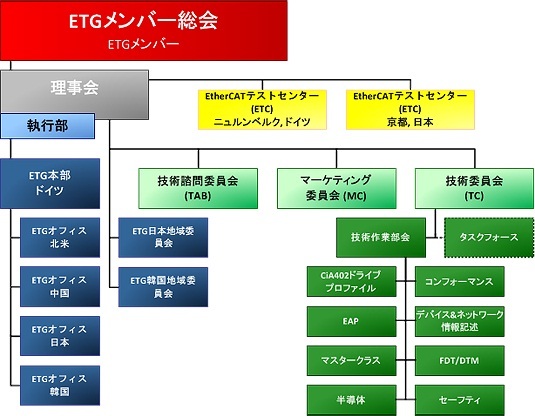
| ETGの目標は、EtherCAT技術がより幅広い技術領域の要件に適合するように拡張することです。 この目標実現のため、ETGはマシンビルダー、システムインテグレーター、エンドユーザーおよびオートメーションデバイスベンダーからなる主導的な制御とアプリケーションの専門技術者によって構成されます。 メンバーは既存技術のアプリケーションに対するフィードバックや将来の仕様拡張への提案を行います。 |
|
 |
|
| ETGは、コアとなる「地域委員会」を設けて日本におけるEtherCATの普及推進活動に取り組んでいます。 当社はその委員会のメンバー(6社)の一員として活動しています。 |
MECHATROLINK-Ⅲとシステム構成について
 |
||
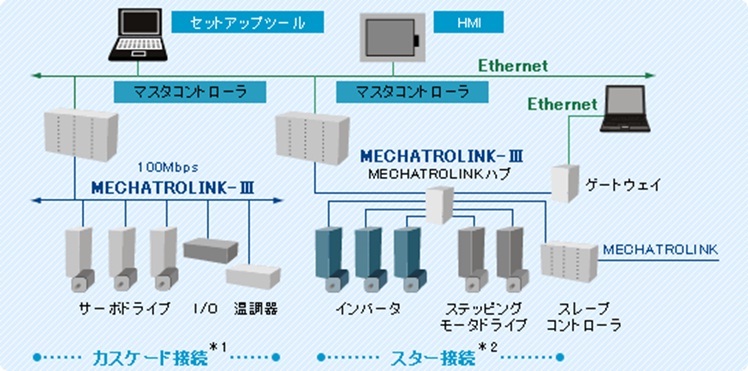
| MECHATROLINKは、すべてのスレーブにおいて同期性を保証するモーションネットワークです。 製造装置や生産ラインを構成する上で必要な制御機器すべてを、1つの省配線システムに接続できます。 また、従来はモーション用ネットワークとI/O用ネットワークを別々に配線していましたが、MECHATROLINKを使用すればネットワークの統一を図ることができます。 |
||
| MECHATROLINK-IIIの新機能 | ||
| ・カスケード接続に加え、システム構成に柔軟に対応できるスター接続が可能です。 ・最大接続スレーブ数が従来の2倍(62局)に、また局間ケーブルは最大で100mに延長出来ます。 ・HUBを使用することによって、そのポートに接続しているノードの活線挿抜ができるので、 保守のために 一部のスレーブを切り離すことが可能 ・スレーブ間で同期制御を行っている場合、他の局の情報をリアルタイムにモニタ可能 |
||
| カスケード接続または、HUBによるスター接続により、様々なシステム構成に対応できます。 | ||
 |
||
MECHATROLINK-Ⅲのマスタモジュール
| 産業用PCに搭載可能なMECHATROLINK-Ⅲのマスタモジュールです。 厚みを変更することなくビルドインできます。 |
||
 |
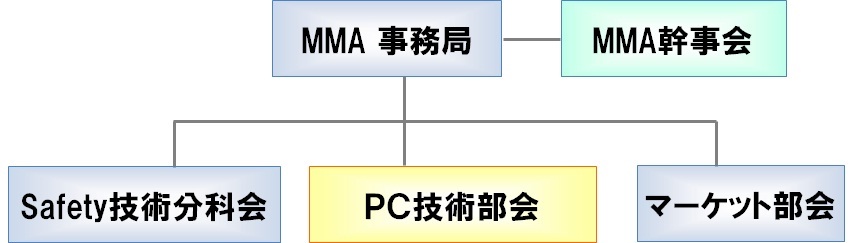
MECHATROLINK協会とは
 |
||
| 本協会は、MECHATROLINKを世界に普及させる為に設立された、MECHATROLINK製品開発メンバー及びMECHATROLINKユーザで構成される組織です。 モーションフィールドネットワークMECHATROLINKファミリーの構築を積極的に推し進めていきます。 アルゴシステムは本協会のPC技術部会に参画しています。 |
||
 |
||
| 2012年設立 | 参画企業: ADLINKジャパン(株) (株)アルゴシステム (株)コンテック (株)テクノ |
(株)デジタル (株)マイクロネット 安川情報システム(株) (株)安川電機 |